Човек и машина: Подводно сътрудничество от ново поколение
Изследователи от MIT Lincoln Laboratory разработват иновативни хардуерни и алгоритмични решения, които позволяват на водолази и автономни подводни апарати (AUV) да работят като един екип в предизвикателни морски среди. Проектът цели да обедини прецизността на човешкото разпознаване и сръчност с мощната изчислителна способност и издръжливост на роботите.
Изображение: Генерирано чрез Svetni.me AI
Според публикация на MIT News [1], традиционно водолазите и автономните роботи рядко си сътрудничат пряко под водата. Докато хората превъзхождат машините в сложни манипулации и разпознаване на обекти в мътни води, те са ограничени откъм скорост, издръжливост и изчислителна мощ. Роботите, от своя страна, са ефективни при картографиране и движение, но често се затрудняват при задачи, изискващи фина моторика или интерпретация на неясни сонарни изображения.
Предизвикателствата на подводната среда
Един от основните проблеми, пред които е изправен екипът на водещия изследовател Маделин Милър (Madeline Miller), е навигацията. В подводни условия, където светлината е оскъдна, а ориентирите липсват, водолазите лесно могат да се дезориентират. За да помогнат на хората, роботите трябва първо сами да разбират средата си.
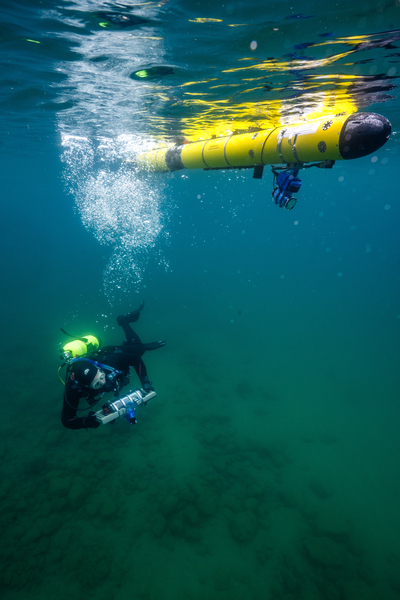
Изображение: Madeleine Miller / MIT Lincoln Laboratory
"В крайна сметка искаме да създадем решения за навигация и възприятие в среди, където няма предварително подготвени карти," обяснява Милър [1].
Алгоритми за споделена навигация
Екипът използва алгоритми, първоначално разработени от групата по морска роботика на MIT, ръководена от Джон Леонард (John Leonard). Тези алгоритми позволяват на робота да изчислява позицията си спрямо водолаза чрез периодични измервания на разстоянието. При тестове в реални океански условия обаче се оказва, че подводните течения усложняват математическия модел, което налага добавянето на повече сензори върху самия водолаз.
AI класификатор с човешка обратна връзка
Вторият ключов стълб на проекта е възприятието. Изследователите са разработили AI класификатор, който обработва едновременно оптични и сонарни данни. Когато системата е несигурна в разпознаването на обект — например дали дадено тяло е самолетна отломка или стара гума, обрасла с миди — тя изпраща информация към водолаза за потвърждение.

Изображение: MIT Lincoln Laboratory
Тази обратна връзка се осъществява чрез подводни акустични модеми. Тъй като скоростта на трансфер на данни под вода е изключително ниска, екипът разработва нови методи за компресия, за да изпраща само най-важната визуална информация към водолаза.
Тестове и бъдещето на технологията
Прототипната система вече е преминала през серия от полеви тестове в крайбрежните води на Нова Англия, река Чарлз в Бостън и Големите езера в Мичиган. Водолазите са използвали специално разработен подводен таблет, наречен "tube-let", оборудван със сензори за налягане, дълбочина и инерционно движение.
С напредването на технологиите и нарастващото значение на подтикваната от човека автономност, подобни системи могат да се окажат критични за инспекцията на подводна инфраструктура, операции по търсене и спасяване, както и за поддържане на глобалната сигурност в морските домейни.